En sensor i allmän mening är en enhet som omvandlar en fysisk kvantitet till en annan, bekväm för bearbetning, överföring eller efterföljande konvertering. Som regel är den första kvantiteten fysisk, inte mottaglig för direkt mätning (temperatur, hastighet, förskjutning, etc.), och den andra är en elektrisk eller optisk signal. En nisch inom området för mätinstrument upptas av sensorer, vars huvudelement är en induktor.
Innehåll
Hur induktanssensorn fungerar och hur den fungerar
Enligt driftsprincipen är induktiva sensorer aktiva, det vill säga de kräver en extern generator för att fungera. Den ger en signal med en given frekvens och amplitud till induktorn.
Strömmen som passerar genom spolens varv skapar ett magnetfält. Om ett ledande föremål kommer in i magnetfältet ändras spolens parametrar.Det återstår bara att fixa denna förändring.
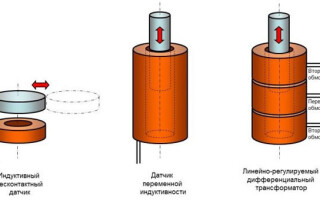
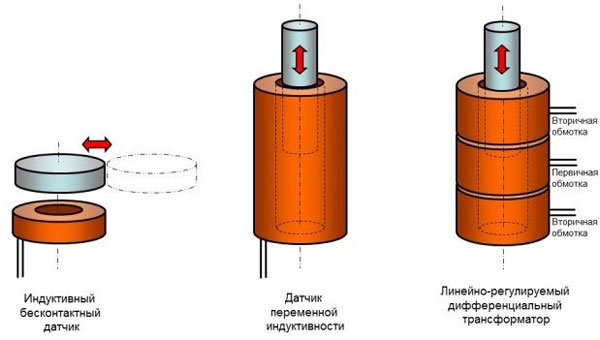
Enkla beröringsfria sensorer reagerar på utseendet av metallföremål i lindningens närområde. Detta ändrar spolens impedans, denna förändring måste omvandlas till en elektrisk signal, förstärka och (eller) fixa passagen av tröskeln med hjälp av en jämförelsekrets.
Sensorer av en annan typ reagerar på förändringar i den longitudinella positionen för föremålet som fungerar som spolens kärna. När objektets position ändras, rör sig det in eller ut ur spolen och ändrar därmed dess induktans. Denna förändring kan omvandlas till en elektrisk signal och mätas. En annan version av en sådan sensor är när ett föremål närmar sig spolen från utsidan. Detta gör att induktansen minskar på grund av jordeffekten.
En annan version av den induktiva förskjutningssensorn är en linjärt justerbar differentialtransformator (LVDT). Det är en kompositspole, gjord i följande ordning:
- sekundärlindning 1;
- primärlindning;
- sekundärlindning 2.
Signalen från generatorn matas till primärlindningen. Det magnetiska fältet som skapas av mittspolen inducerar en EMF i var och en av de sekundära (transformatorprincip). Kärnan, när den rör sig, ändrar den ömsesidiga förbindelsen mellan spolarna, vilket förändrar den elektromotoriska kraften i var och en av lindningarna. Denna förändring kan fixas av mätkretsen. Eftersom kärnans längd är mindre än den sammansatta spolens totala längd, kan objektets position entydigt bestämmas av EMF-förhållandet i sekundärlindningarna.
På samma princip - en förändring i den induktiva kopplingen mellan lindningarna - byggs en svängsensor.Den består av två koaxialspolar. Signalen appliceras på en av lindningarna, EMF i den andra beror på den ömsesidiga rotationsvinkeln.
Från driftprincipen är det uppenbart att induktiva sensorer, oavsett design, är beröringsfria. De arbetar på avstånd och kräver inte direktkontakt med det kontrollerade föremålet.
För- och nackdelar med induktiva sensorer
Fördelarna med induktiva sensorer inkluderar främst:
- designtillförlitlighet;
- brist på kontaktanslutningar;
- hög uteffekt, vilket minskar påverkan av brus och förenklar styrkretsen;
- hög känslighet;
- förmågan att arbeta från källor till växelspänning av industriell frekvens.
Den största nackdelen med sensorer av induktiv typ är deras storlek, vikt och tillverkningskomplexitet. För lindning av spolar med de givna parametrarna krävs specialutrustning. Behovet av att noggrant bibehålla amplituden för signalen från masteroscillatorn anses också vara ett minus. När det ändras ändras också känslighetsområdet. Eftersom sensorerna endast arbetar på växelström blir bibehållandet av amplituden ett visst tekniskt problem. Direkt (eller genom en nedtrappningstransformator) kommer det inte att vara möjligt att ansluta sensorn till ett hushålls- eller industrinätverk - i den kan spänningsfluktuationer i amplitud eller frekvens till och med nå 10% i normalt läge, vilket gör mätnoggrannheten oacceptabel .
Mätnoggrannheten kan också påverkas av:
- magnetiska fält från tredje part (avskärmning av sensorn är omöjlig baserat på principen om dess funktion);
- tredjeparts EMF-pickuper i matnings- och mätkablar;
- tillverkningsfel;
- sensorkarakteristiska fel;
- glapp eller deformationer på sensorinstallationsplatsen som inte påverkar den totala prestandan;
- beroende av noggrannhet på temperatur (parametrarna för lindningstråden ändras, inklusive dess motstånd).
Induktanssensorernas oförmåga att reagera på utseendet av dielektriska föremål i deras magnetfält kan tillskrivas både fördelar och nackdelar. Å ena sidan begränsar detta tillämpningsområdet för deras tillämpning. Å andra sidan gör det den okänslig för närvaron av smuts, fett, sand etc. på de övervakade föremålen.
Kunskap om bristerna och möjliga begränsningar i driften av induktiva sensorer möjliggör rationell användning av deras fördelar.
Omfattning av induktiva sensorer
Induktiva närhetssensorer används ofta som gränslägesbrytare. Sådana enheter har blivit utbredda:
- i säkerhetssystem, som sensorer för obehörig öppning av fönster och dörrar;
- i telemekaniksystem, som sensorer för den slutliga positionen för enheter och mekanismer;
- i vardagen i scheman för att indikera stängt läge för dörrar, luckor;
- för att räkna föremål (till exempel att röra sig längs med transportbandet);
- för att bestämma växlarnas rotationshastighet (varje tand, som passerar förbi sensorn, skapar en impuls);
- i andra situationer.

Vinkelgivare kan användas för att bestämma rotationsvinklarna för axlar, kugghjul och andra roterande komponenter, såväl som absoluta pulsgivare. Sådana anordningar kan också användas i verktygsmaskiner och robotanordningar tillsammans med linjära positionssensorer. Där du behöver veta exakt positionen för mekanismernas noder.
Praktiska exempel på implementering av induktiva sensorer
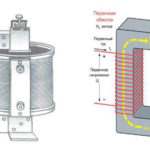
I praktiken kan konstruktioner av induktiva sensorer implementeras på olika sätt. Det enklaste utförandet och inkluderingen är för en tvåtråds enkelsensor, som övervakar närvaron av metallföremål i dess känslighetszon. Sådana enheter är ofta gjorda på basis av en E-formad kärna, men detta är inte en grundläggande punkt. En sådan implementering är lättare att tillverka.
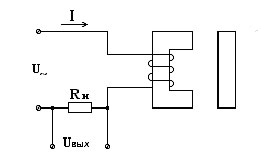
När spolresistansen ändras ändras strömmen i kretsen och spänningsfallet över belastningen. Dessa förändringar kan begås. Problemet är att belastningsmotståndet blir kritiskt. Om den är för stor blir förändringarna i strömmen när ett metallföremål dyker upp relativt små. Detta minskar systemets känslighet och brusimmunitet. Om den är liten kommer strömmen i kretsen att vara stor, en mer motståndskraftig sensor kommer att krävas.
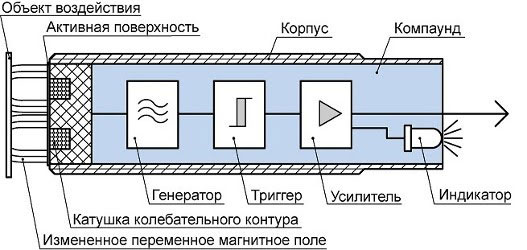
Därför finns det konstruktioner där mätkretsen är inbyggd i sensorhuset. Generatorn genererar pulser som matar induktorn. När en viss nivå nås, utlöses avtryckaren och växlar från tillstånd 0 till 1 eller vice versa. Buffertförstärkaren förstärker signalen vad gäller effekt och (eller) spänning, tänder (släcker) lysdioden och matar ut en diskret signal till den externa kretsen.
Utsignalen kan bildas:
- genom elektromagnetisk eller halvledarrelä – noll eller en spänningsnivå;
- "torr kontakt" elektromagnetiskt relä;
- öppen samlare transistor (strukturer n-p-n eller p-n-p).
I det här fallet krävs tre ledningar för att ansluta sensorn:
- mat;
- gemensam tråd (0 volt);
- signaltråd.
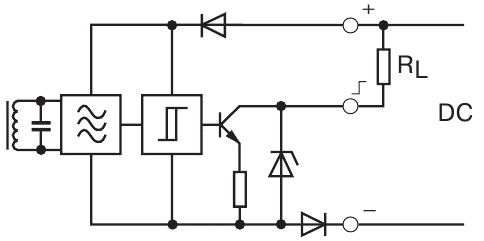
Sådana sensorer kan också drivas av DC-spänning. Pulserar till induktansen de bildas med hjälp av en intern generator.
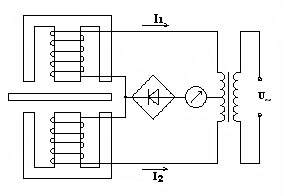
Differentialgivare används för positionsövervakning. Om det kontrollerade objektet är symmetriskt med avseende på båda spolarna är strömmen genom dem densamma. När någon lindning förskjuts mot fältet uppstår en obalans, den totala strömmen upphör att vara lika med noll, vilket kan registreras av en indikator med en pil i mitten av skalan. Indikatorn kan användas för att bestämma både storleken på skiftet och dess riktning. Istället för en pekanordning kan du använda ett kontrollschema som, när du får information om en positionsändring, kommer att avge en signal, vidta åtgärder för att rikta in objektet, göra justeringar av den tekniska processen, etc.

Sensorer gjorda enligt principen om linjärt justerbara differentialtransformatorer produceras i form av kompletta strukturer, som är en ram med primära och sekundära lindningar och en stång som rör sig inuti (den kan vara fjäderbelastad). Ledningar tas ut för att skicka en signal från generatorn och ta bort EMF från sekundärlindningarna. Ett kontrollerat föremål kan fästas mekaniskt på stången. Den kan också vara gjord av ett dielektrikum - det är bara stammens position som har betydelse för mätningen.
Trots vissa inneboende brister stänger den induktiva sensorn många områden associerade med beröringsfri detektering av föremål i rymden.Trots den ständiga utvecklingen av teknik kommer denna typ av anordning inte att lämna marknaden för mätanordningar inom överskådlig framtid, eftersom dess funktion är baserad på fysikens grundläggande lagar.
Liknande artiklar: